Il ciclo della vita.
La dinamica degli ecosistemi è uno degli argomenti più interessanti, in cui la fisica può essere applicata con successo per studiare l’evoluzione delle popolazioni di prede e predatori.
Supponiamo che nel nostro ecosistema ci siano solo due specie in lotta per la sopravvivenza: i pesci (le prede) e gli squali (i predatori).
I pesci hanno a disposizione risorse di cibo praticamente illimitate, se lasciate proliferare si moltiplicano molto rapidamente.
Viceversa gli scquali si cibano solo di pesci, la loro fonte di cibo è quindi molto più scarseggiante, e una sovrappopolazione di predatori causera la loro estinzione per mancanza di cibo. Con una simpatica simulazione è possibile visualizzare la dinamica.
In questa simulazione i quadratini verdi rappresentano i pesci, che si moltiplicano rapidamente, in rosso gli squali, se mangiano pesci si riproducono, altrimenti muoino. Ecco qui un video simpatico che mostra questo ecosistema in azione:
Come si può osservare in numero di pesci e squali aumenta e dinimuisce periodicamente. Se riportiamo su un grafico il numero di prede e quello di predatori notiamo molto bene questo comportamento:
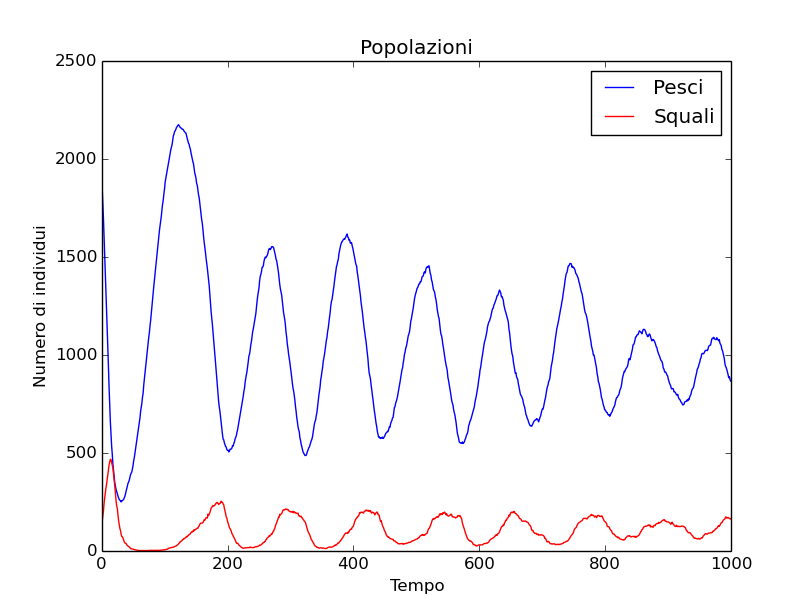
Prede e predatori
La fisica può descrivere questo tipo di ecosistemi? Si!
Il numero di pesci all’interno del reticolo lo indichiamo con n, il numero di scquali con u.
Scriviamo un’equazione che descriva il comportamento medio di squali e pesci: la probabilità di un pesce di generare un figlio è costante (

Allo stesso modo la probabilità di uno squalo di generare un figlio è tanto maggiore quanto più alta è la probabilità di incrociare un pesce (

")
Queste equazioni (dette di Lotka-Volterra in onore dei due matematici che le formularono per primi) non hanno soluzione analitica, tuttavia con un cambio di variabili possiamo riscriverle in modo da poterne dare un’interpretazione fisica:
")


Con questa sostituzione il sistema di equazioni che descrive il comportamento medio dei nostri “pesciolini” è:

Queste due equazioni differenziali adesso descrivono un sistema hamiltoniano canonico:

Si può facilmente ricavare l’hamiltoniana di questo sistema:

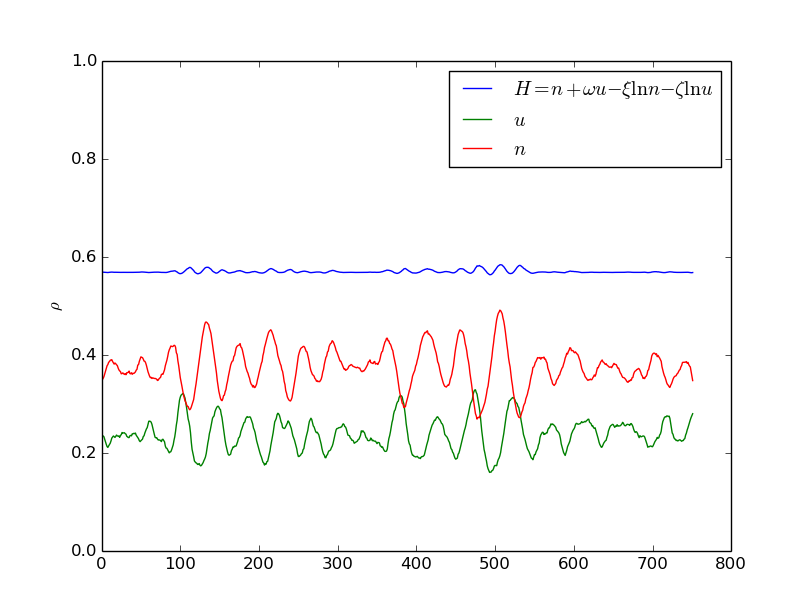
Quindi è possibile definire un “energia” dell’ecosistema, che è in media conservata (ricordiamoci che le equazioni che abbiamo scritto valgono in media, non tengono conto di piccole fluttuazioni locali della popolazione).
Risostituendo le variabili originali otteniamo che l’energia del sistema é:
Se il numero di pesci e squali è molto alto questo implica che la loro somma, pesata sui coefficienti

Se dividiamo tutto per

Dove adesso 

Questa condizione tuttavia è molto difficile da raggiungere in pratica, ecco la stima dei parametri per
una delle simulazioni effettuate:

I valori ottenuti numericamente dalla simulazione sono:

Come si può vedere il modello di Lotka-Volterra descrive molto bene l’andamento che è stato misurato.



 abbiamo indicato la derivata seconda della posizione fatta rispetto al tempo due volte.
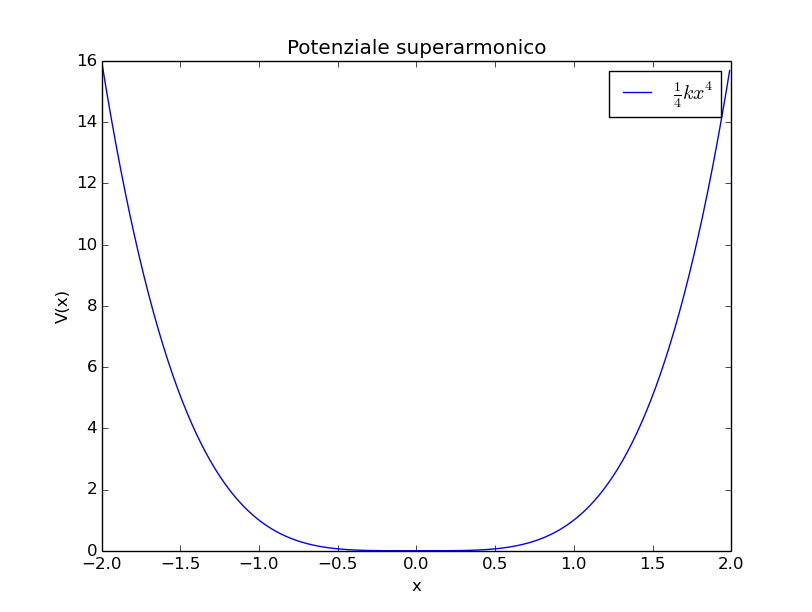
abbiamo indicato la derivata seconda della posizione fatta rispetto al tempo due volte. = \frac{1}{4} k x^4")
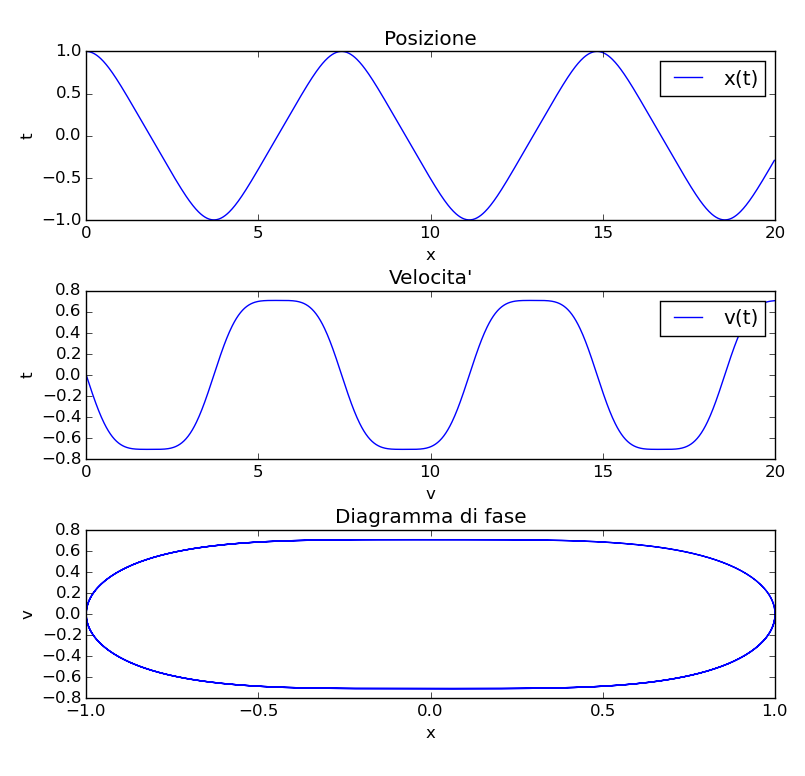
 che rappresenta l’ampiezza di oscillazione:
che rappresenta l’ampiezza di oscillazione:")
")
![\displaystyle m = [Kg] \qquad k = [\frac{N}{m^3}] = [\frac{Kg}{m^2 s}] \qquad x_0 = [m]](http://s0.wp.com/latex.php?latex=+++%5Cdisplaystyle+m+%3D+%5BKg%5D+%5Cqquad+k+%3D+%5B%5Cfrac%7BN%7D%7Bm%5E3%7D%5D+%3D+%5B%5Cfrac%7BKg%7D%7Bm%5E2+s%7D%5D+%5Cqquad+x_0+%3D+%5Bm%5D+++&bg=ffffff&fg=000000&s=0 "\displaystyle m = [Kg] \qquad k = [\frac{N}{m^3}] = [\frac{Kg}{m^2 s}] \qquad x_0 = [m]")
![\displaystyle [s] = [Kg]^\alpha [\frac{Kg}{m^2 s^2}]^\beta [m]^\gamma](http://s0.wp.com/latex.php?latex=+++%5Cdisplaystyle+%5Bs%5D+%3D+%5BKg%5D%5E%5Calpha+%5B%5Cfrac%7BKg%7D%7Bm%5E2+s%5E2%7D%5D%5E%5Cbeta+%5Bm%5D%5E%5Cgamma+++&bg=ffffff&fg=000000&s=0 "\displaystyle [s] = [Kg]^\alpha [\frac{Kg}{m^2 s^2}]^\beta [m]^\gamma")


")
![\displaystyle0 = [Kg]^\alpha [\frac{Kg}{m^2 s^2}]^\beta [m]^\gamma](http://s0.wp.com/latex.php?latex=+++%5Cdisplaystyle0+%3D+%5BKg%5D%5E%5Calpha+%5B%5Cfrac%7BKg%7D%7Bm%5E2+s%5E2%7D%5D%5E%5Cbeta+%5Bm%5D%5E%5Cgamma+++&bg=ffffff&fg=000000&s=0 "\displaystyle0 = [Kg]^\alpha [\frac{Kg}{m^2 s^2}]^\beta [m]^\gamma")


 non può dipendere da nessun parametro, è quindi una costante. Da sole considerazioni di tipo dimensionale abbiamo ricavato la formula del periodo dell’oscillatore superarmonico, senza sapere nulla sulla soluzione matematica!
non può dipendere da nessun parametro, è quindi una costante. Da sole considerazioni di tipo dimensionale abbiamo ricavato la formula del periodo dell’oscillatore superarmonico, senza sapere nulla sulla soluzione matematica!

![\displaystyle V = \frac{1}{n}kx^{n}\qquad \stackrel{n \rightarrow \infty}{\longrightarrow}\qquad \left\{\begin{array}{lr} \infty & x < -x_0 \mbox{ o } x > x_0 \\ 0 & x \in [-x_0,x_0] \end{array}\right.](http://s0.wp.com/latex.php?latex=+++%5Cdisplaystyle+V+%3D+%5Cfrac%7B1%7D%7Bn%7Dkx%5E%7Bn%7D%5Cqquad+%5Cstackrel%7Bn+%5Crightarrow+%5Cinfty%7D%7B%5Clongrightarrow%7D%5Cqquad+%5Cleft%5C%7B%5Cbegin%7Barray%7D%7Blr%7D+%5Cinfty+%26+x+%3C+-x_0+%5Cmbox%7B+o+%7D+x+%3E+x_0+%5C%5C+0+%26+x+%5Cin+%5B-x_0%2Cx_0%5D+%5Cend%7Barray%7D%5Cright.+++&bg=ffffff&fg=000000&s=0 "\displaystyle V = \frac{1}{n}kx^{n}\qquad \stackrel{n \rightarrow \infty}{\longrightarrow}\qquad \left\{\begin{array}{lr} \infty & x < -x_0 \mbox{ o } x > x_0 \\ 0 & x \in [-x_0,x_0] \end{array}\right.")
 . Calcoliamo la velocità a cui si muove dentro la buca:
. Calcoliamo la velocità a cui si muove dentro la buca:


 ) la costante C approssimata ha un valore di 5.66, neanche troppo distante dal valore reale pari a 7.4. Questo è uno sviluppo corretto per grandi valori di n.
) la costante C approssimata ha un valore di 5.66, neanche troppo distante dal valore reale pari a 7.4. Questo è uno sviluppo corretto per grandi valori di n.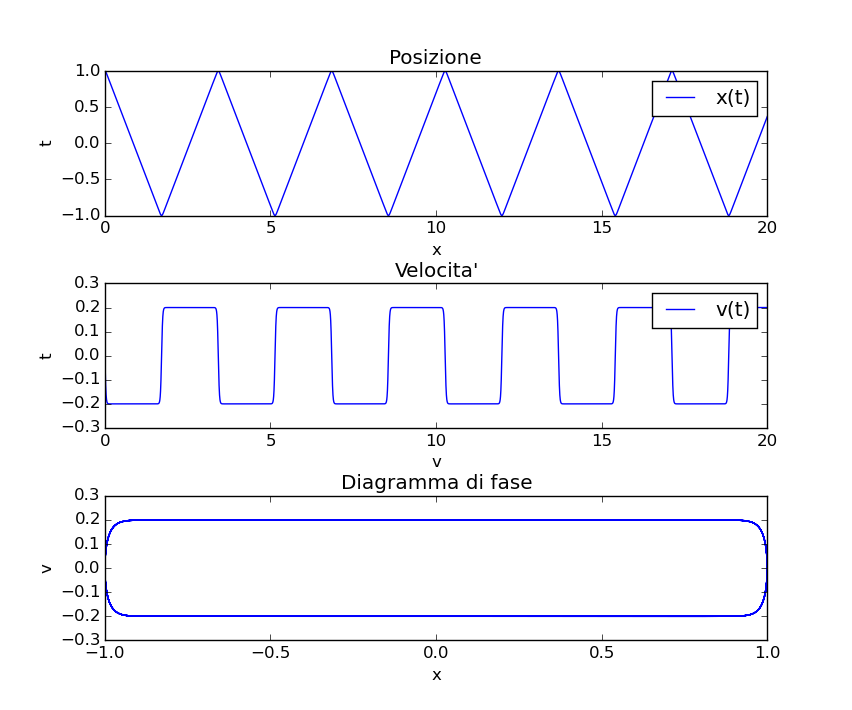

}")
 alla posizione
alla posizione }} = \int_0^{\frac{T}{2}}dt")

 del sistema è pari all’energia potenziale superarmonica che l’oscillatore ha nel punto di massima ampiezza:
del sistema è pari all’energia potenziale superarmonica che l’oscillatore ha nel punto di massima ampiezza:
^4}}")



